NをDCCで自動運転 その3 LokSound micro V4.0を試してみた [Arduinoで自動運転(DCC)]
こんばんは。今日の都内は朝から青空で残暑が夏の名残を感じました。
それにしても、台風の被害が酷いですね。
お見舞い申し上げます。
そして、週末から来週にかけて、また台風が。。。
被害が出ないことを祈ります。
さて、名古屋方面では、基盤作成も着々と進んでいるようですが、私も作業を始めたDCC/MM2シールドですが、なんとなく使い方が解ってきました。
前回は、デジトラックスのDZ-125でやってみたのですが、今回は、本命のESUのLokSound micro V4.0を試してみました。
ESUのLokSound micro V4.0を使うの自体、超久々だったので、プログラマを起動したらこんな画面が!
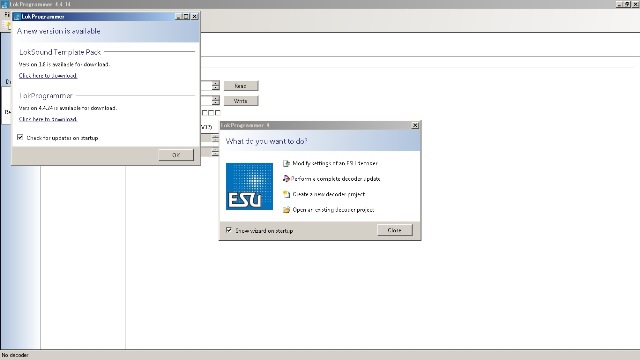
プログラマの版数が4.4.14だったのが、4.4.24になってます。
他の方の情報によると、GUI関係がかなり変わったよなので楽しみです。
ただ、今日起動したら、既に4.4.25が公開されているようです。
で、今回のArduinoのプログラムですが、デコーダーをデコーダーテスタに繋いでの動作確認をしました。
やってみて解ったのは、サウンドの有り、無しで、デコーダーの動きが変わるようです。
サウンドが有りの状態で、プログラムを作れば、サウンドをOFFにしても動作は変わらないとは思います。
提供されているファンクション関連の関数とかは、関数コールをした後に、少々ディレイのような感じに時間を空けて、次の関数をコールしないと、どうも、動きが安定しませんでした。
今回は、デコーダーテスタでの確認でしたが、次回は、デコーダーを搭載した車輌で確認してみようと思います。
いろいろ
それにしても、台風の被害が酷いですね。
お見舞い申し上げます。
そして、週末から来週にかけて、また台風が。。。
被害が出ないことを祈ります。
さて、名古屋方面では、基盤作成も着々と進んでいるようですが、私も作業を始めたDCC/MM2シールドですが、なんとなく使い方が解ってきました。
前回は、デジトラックスのDZ-125でやってみたのですが、今回は、本命のESUのLokSound micro V4.0を試してみました。
ESUのLokSound micro V4.0を使うの自体、超久々だったので、プログラマを起動したらこんな画面が!
プログラマの版数が4.4.14だったのが、4.4.24になってます。
他の方の情報によると、GUI関係がかなり変わったよなので楽しみです。
ただ、今日起動したら、既に4.4.25が公開されているようです。
で、今回のArduinoのプログラムですが、デコーダーをデコーダーテスタに繋いでの動作確認をしました。
やってみて解ったのは、サウンドの有り、無しで、デコーダーの動きが変わるようです。
サウンドが有りの状態で、プログラムを作れば、サウンドをOFFにしても動作は変わらないとは思います。
提供されているファンクション関連の関数とかは、関数コールをした後に、少々ディレイのような感じに時間を空けて、次の関数をコールしないと、どうも、動きが安定しませんでした。
今回は、デコーダーテスタでの確認でしたが、次回は、デコーダーを搭載した車輌で確認してみようと思います。
いろいろ
#include <avr/wdt.h>
#include <SPI.h>
#include "DSGatewayLib.h"
#define CHANGETIME 500
DSGatewayLib Gateway;
void setup()
{
Serial.begin(9600);
pinMode(12,OUTPUT); // チェック用LED
pinMode(8,INPUT); // プッシュボタン
Serial.println("Step100");
Gateway.begin();
delay(5000);
Serial.println("Step200");
Gateway.SetPower(true);
}
void loop()
{
int aSpeed;
word aLocAddr = ADDR_DCC + 49; //DCCアドレスを指定
digitalWrite(12, HIGH); // LED 点灯
if (digitalRead(8)==HIGH){
Serial.println("Step101");
digitalWrite(12, LOW); // LED 消灯
// Go forward
Gateway.SetLocoDirection( aLocAddr, 1); // 前進
delay(3000);
Serial.println("Step201");
Gateway.SetLocoFunction( aLocAddr, 1, 1 ); // F1 サウンドON
delay(40000);
Serial.println("Step202");
aSpeed =1;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 加速
delay(10000);
Serial.println("Step203");
Gateway.SetLocoFunction( aLocAddr, 0, 1 ); // F0 ライトON
delay(3000);
Gateway.SetLocoFunction( aLocAddr, 2, 1 ); // F2 汽笛長ON
delay(1000);
Gateway.SetLocoFunction( aLocAddr, 2, 0 ); // F2 汽笛長OFF
delay(6000);
Serial.println("Step204");
aSpeed =512;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 加速
delay(10000);
Serial.println("Step205");
aSpeed = 0;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 減速
delay(15000);
Serial.println("Step206");
// Go reverse
Gateway.SetLocoDirection( aLocAddr, 2); // 後進
delay(5000);
Serial.println("Step301");
aSpeed =1;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 加速
delay(20000);
Serial.println("Step302");
aSpeed =512;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 加速
delay(10000);
Serial.println("Step302");
aSpeed = 0;
Gateway.SetLocoSpeed( aLocAddr, aSpeed); // 減速
delay(15000);
Serial.println("Step401");
Gateway.SetLocoFunction( aLocAddr, 0, 0 ); // F0 ライトOFF
delay(3000);
Serial.println("Step402");
Gateway.SetLocoFunction( aLocAddr, 1, 0 ); // F1 サウンドOFF
delay(18000);
Serial.println("Step500");
}
}

湯るフェスライブ中継 他動画がメインの別館です
ゆる鉄モジュール倶楽部
リンク
鉄ヲタパパのお部屋
鉄道に萌え
taka@の挑戦!?
綾雄鉄道
綾雄鉄道(ブログ)
マンダーテイカーの24/7部屋
凡鉄
寝台急行銀河好きのブログ
kazuの日々の企み
趣味日記
BAY SIDE TRAIN
鉄道模型Nゲージ冷や水鉄道
日常的戯言也。
Railway
Picagata鉄工所
ものぐさの模
みやび鉄道の右往左往
鉄道模型・色指し三昧
軌道検測員ととの気ままなぶろぐ
沿線住猫'sBlog
鉄道的生活(埼玉北部総合車両センター)
動力車操縦者
Sirokamo-Industry
ヘッポコ出戻りモデラーの備忘録
D-Train(別館)
みづほトラベル
原殿鉄道 建設への道
アトリエ日誌
らすらすのブログ
Viva Viva JNR
Viva Viva JNR!!(新居)



関数は連続してセットすると詰まってしまうので、50msくらいのウェイトが必要です。delay関数はms単位で設定できるので、50をセットしてもらえれば問題ないはずです。
by Yaasan (2016-09-03 19:45)
Yaasanさん、こんばんは。
>関数は連続してセットすると詰まってしまうので、50msくらいのウェイトが必要です。
やはりそうなんですね。ありがとうございます。
>delay関数はms単位で設定できるので、50をセットしてもらえれば問題ないはずです。
わかりました。
by 目黒のダンボ (2016-09-06 18:52)